什么是Virgil 3d项目
Virgil是Dave Airlie(from Red Hat)的一个研究项目。该项目在虚拟机中创建一个虚拟GPU,通过它允许虚拟机操作系统(Guest OS)使用物理机(宿主机,Host)的物理GPU来加速3D渲染。让用户感觉拥有一个完全独立于主机的虚拟机GPU。
该虚拟显卡的设计基于Gallium3D,使用Gallium TGSI中间件作为着色器。虚拟显卡的渲染实现是在主机系统中作为qemu、crosvm等VMM(virtual machine manager)的一部分完成的。目前支持OpenGL(4.3)和OpenGL ES (3.2),并且需要SDL支持。可以在任何支持的显卡/驱动程序上加速渲染。
该项目还包含一个完整的Linux虚拟机技术栈,包括Linux内核KMS驱动程序(DRM/i915),X.org(2D DDX驱动程序)和Mesa(3D驱动程序)组成。
现在,所有组件都已经集成到了各个项目中:
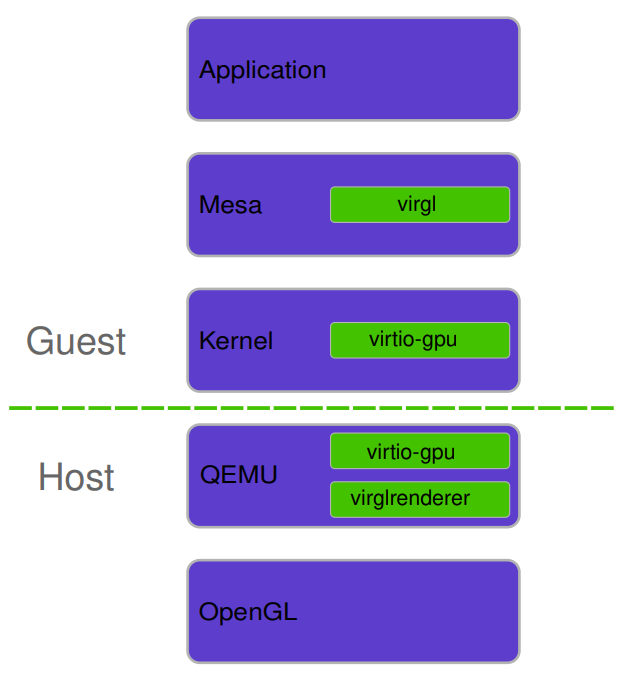
- Linux 内核4.4开始,包含3D支持的部分。
- Mesa master分支包含virgl 3D驱动程序。
- QEMU 2.5开始包含virtio-gpu,以及支持GL的GTK3前端。
- virglrenderer库已经可以提供QEMU或者CrosVM所需要的API。
未来的功能以及缺点:
- 通过编解码实现远程渲染(rendering)暂不支持。
- Windows Guest以及Direct 3D暂不支持。
- 不支持Passing through GPU给guest。
开始搭建环境
有了上面的virgl技术栈的图,事情变得清晰多了:在Host端安装virglrenderer,安装最新的Mesa、和Linux Kernel。
编译安装virglrenderer
1 | apt install python3-pip |
确认Mesa 支持
1 | # glxinfo |grep renderer |
如果renderer string使用 llvmpipe,说明Mesa不支持:1
OpenGL renderer string: llvmpipe (LLVM 5.0, 256 bits)
如果renderer string使用 Intel,说明3D驱动安装正确:1
2OpenGL renderer string: Mesa DRI Intel(R) HD Graphics 620 (Kaby Lake GT2)
如果当前Mesa不支持的话,请参考Mesa的官网,编译安装Mesa
跟上面一样,这里还是简述一下吧。1
2
3
4
5
6
7
8apt install libelf-dev libbison-dev flex libxrandr-dev valgrind libunwind-dev wayland-scanner++ libwayland-bin libwayland-dev libxdamage-dev libxcb-glx0-dev libx11-xcb-dev libxcb-dri2-0-dev libxcb-dri3-dev libxcb-present-dev libxshmfence-dev libxxf86vm-dev
git clone https://gitlab.freedesktop.org/mesa/mesa.git
cd mesa
meson builddir/
ninja -C builddir/
ninja -C builddir/ install
重新编译安装CrosVM
加上参数--features=gpu,x,virgl_renderer1
2
3
4cargo build --features=gpu,x,virgl_renderer #BTW, 如果需要图形加速,需要打开这几个参数,缺一不可!
mkdir -p /usr/share/policy/crosvm/ #这里面是CrosVM运行时的一些policy配置
cp -r src/platform/crosvm/seccomp/x86_64/* /usr/share/policy/crosvm/
创建虚拟机
Host
启动X(xinit),或者桌面环境。加上参数-gpu --x-display :01
2
3
4
5
6
7
8crosvm run --disable-sandbox \
--cpus 4 --mem 4096 \
--rwdisk=ubuntu-rootfs.img \
--params=root=/dev/vda \
--gpu --x-display :0 \
--socket=crosvm.sock \
--evdev /dev/input/event18 --evdev /dev/input/event19 \
vmlinux-5.4.18
参数说明:
- –disable-sandbox: 如果上一篇文章里面的minijail已经正确安装,可以省略这个参数,大概是为了安全性,不详述了吧,因为——不懂~!
- –cpus 4 –mem 4096: vCPU数目和虚拟内存大小4096M
- –rwdisk=ubuntu-rootfs.img: 虚拟机镜像。可以使用上一篇文章中的方法,使用debootstrap生成一个rootfs镜像;CrosVM同样支持带有分区信息虚拟机镜像,可以直接使用QEMU虚拟机的Raw或者Qcow2类型的镜像,没有压力。
- –gpu –x-display :0 : 开起GPU以及X显示支持,这个参数是全篇的”精髓”,上面安装一大堆的库,就为了这两个参数。
- –socket=crosvm.sock : socket用于控制CrosVM以及通信。
- –evdev /dev/input/event18 : Passthrough 鼠标和键盘给虚拟机,需要额接一套键鼠。不过后面想尽量可以专门讲一期外设吧,尽量……。
- vmlinux-5.4.18 : 虚拟机内核,ELF 64-bit LSB executable格式的,就是编译完kernel之后,在源码根目录生成的那个静态链接的内核文件(statically linked)。注: 为了方便,建议将所有用到的内核模块(module)都配置成built-in (y)而不是m。否则,需要一个initramfs,通过(-i)参数传递给crosvm,而且initrd的大小有限制,比较麻烦。
Guest
启动X(xinit),执行3D程序。同样可以使用glxinfo来确认3D驱动是否安装正确1
2
3# glxinfo |grep renderer
OpenGL renderer string: virgl
如果renderer string是virgl,说明guest里的3D环境已经ready了。
Have Fun!

